
周日回顾一些概率和统计分析知识点,重点学习卡夫曼滤波知识,直观感觉跟贝叶斯估计有相当的关联。
一些基本概念
| 基础概念 | 定义 / 关键词 | 典型示例 | 补充说明 |
|---|---|---|---|
| 均匀分布 | 各事件发生概率完全相等 | 投硬币、掷骰子、彩票号码、随机数 | 任意结果出现的可能性相同 |
| 正态分布 | 由均值、方差、标准差决定;围绕均值上下波动 | 白噪声、身高、体重、血压、心率、高考分数、测量数据 | 现实中最常见的分布,呈钟形 |
| 泊松分布 | 均值 = 方差;事件独立且均匀发生;描述 次数 的概率 | 客服接电话数量、排队人数、流量到达次数 | 常用于“单位时间/单位空间的事件发生次数” |
| 概率密度 | 某点附近累计概率;积分得到区间概率 | 连续分布中的“高度” | 密度本身不是概率,积分后才是概率 |
| 区间概率 | 在某区间内事件发生的总概率 | 如:“90% 区间” | 区间越大,包含概率越高;100% 表示所有可能性 |
| 置信度 | 对一个预测本身的可信程度(而不是概率分布) | “上涨预测的置信度 90%” | 置信度 ≠ 概率分布;是“预测的可靠性” |
| 卡尔曼滤波 | 利用“预测 + 观测”不断更新状态的算法 | 位置跟踪、传感器融合、导航系统 | 以下 |
来自:
卡尔曼滤波原理解读
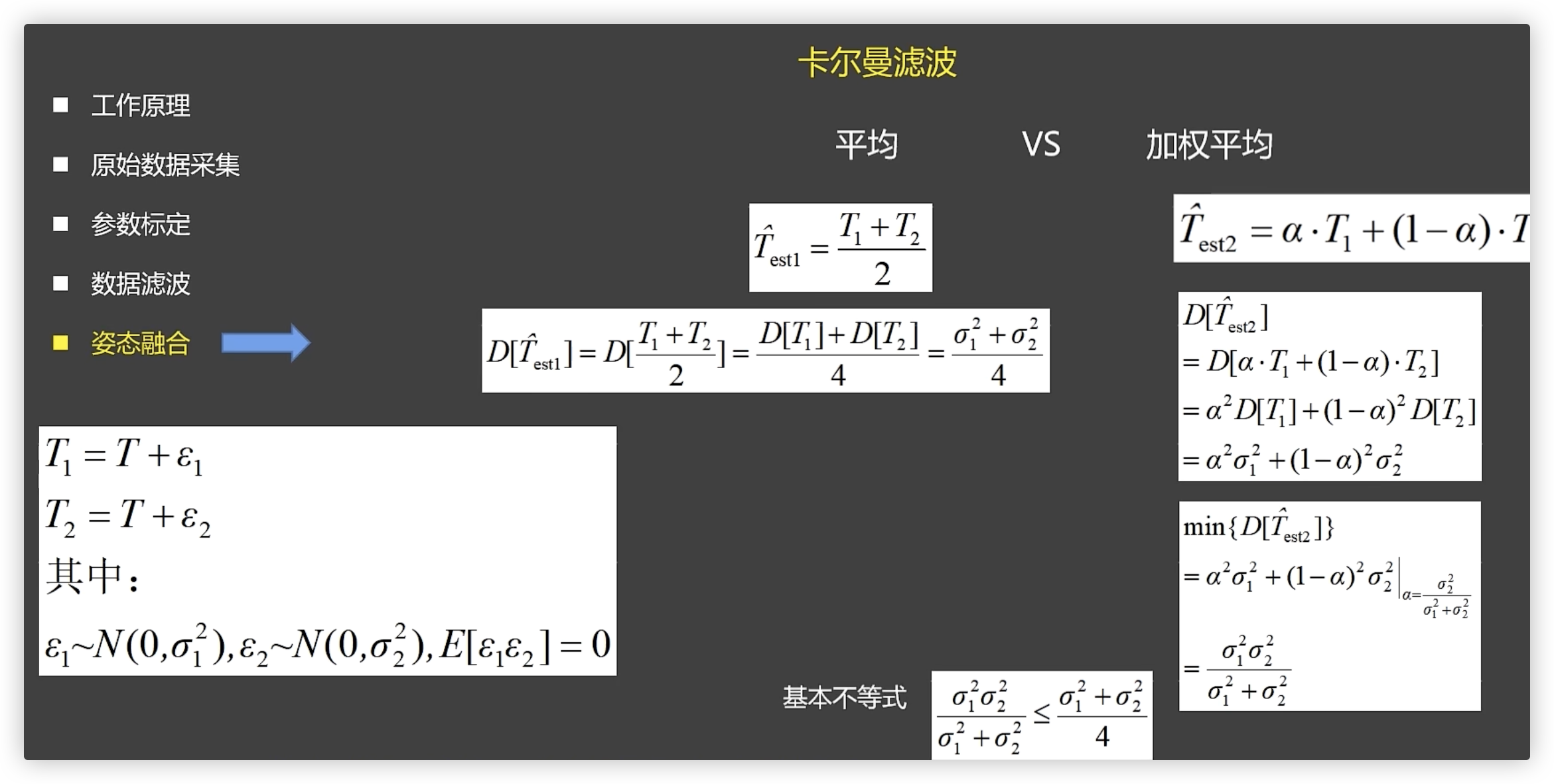
“卡尔曼滤波本质上是一种最优加权平均”
理解起点:两把温度计,一把水银,一把电子,测温结果
$T_1 = T + \varepsilon_1$
$T_2 = T + \varepsilon_2$
噪声满足:
$\varepsilon_1\sim N(0,\sigma_1^2),\quad \varepsilon_2\sim N(0,\sigma_2^2)$
$E[\varepsilon_1\varepsilon_2] = 0$
$\varepsilon_1 \sim N(0, \sigma_1^2)$ --- 表示:$\varepsilon_1$ 服从均值 0、方差** $\sigma_1^2$ 的正态分布
$E[\varepsilon_1 \varepsilon_2]$ 是统计学中的 期望(Expectation),在这里用于描述 两个噪声之间是否相关。$\text{Cov}(\varepsilon_1,\varepsilon_2) = E[\varepsilon_1 \varepsilon_2]$
含义:
- 两个不同精度的传感器测同一个真实温度 T
- $T_1$ 和 $T_2$ 有不同大小的噪声
这就是“状态融合”的基本输入。
平均值与方差
对两把温度计的结果可以采用两种方式融合,一种是算术平均,一种是加权平均。
算术平均方式
最直观的方式就是求平均值: $\hat{T}_{est1} = \frac{T_1 + T_2}{2}$
代噪声模型 $\hat{T}_{est1} = \frac{(T + \varepsilon_1) + (T + \varepsilon_2)}{2} = T + \frac{\varepsilon_1 + \varepsilon_2}{2}$
求方差
T 是常数 → 无方差, 噪声互不相关 → 方差可简单相加:
$D[\hat{T}_{est1}] = D\left(\frac{\varepsilon_1+\varepsilon_2}{2}\right)$ $= \frac{1}{4}D[\varepsilon_1] + \frac{1}{4}D[\varepsilon_2]$ $= \frac{1}{4}\sigma_1^2 + \frac{1}{4}\sigma_2^2$
$\boxed{D[\hat{T}_{est1}] = \frac{\sigma_1^{2} + \sigma_2^{2}}{4}}$
加权平均方式
$\alpha越小T_1的权重越小,T_2的权重越大$
$\hat{T}_{est2}=\alpha T_1 + (1-\alpha)T_2$
代噪声模型 $\hat{T}_{est2}=\alpha (T + \varepsilon_1) + (1-\alpha)(T + \varepsilon_2)$
展开: $= T + \alpha \varepsilon_1 + (1-\alpha)\varepsilon_2$
求方差 噪声独立 → 直接加:
$D[\hat{T}_{est2}] = D(\alpha \varepsilon_1 + (1-\alpha)\varepsilon_2)$
$= \alpha^2 D[\varepsilon_1] + (1-\alpha)^2D[\varepsilon_2]$
$\boxed{ D[\hat{T}_{est2}] = \alpha^2\sigma_1^2 + (1-\alpha)^2\sigma_2^2 }$
求最优权重 α:
目标: 让 $\alpha^2\sigma_1^2 + (1-\alpha)^2\sigma_2^2$ 最小。
求导: $2\alpha\sigma_1^2 - 2(1-\alpha)\sigma_2^2 = 0$
解得:
$\boxed{ \alpha = \frac{\sigma_2^2}{\sigma_1^2 + \sigma_2^2} }$
这说明:
- 噪声越小 → 权重越大
- 噪声越大 → 权重越小
完全符合直觉: 📌 越“准”的传感器占比越高。
将 α 代回去得到最小方差:
代入:
$D_{min} = \frac{\sigma_1^2 \sigma_2^2}{\sigma_1^2 + \sigma_2^2}$
即:
$\boxed{D_{min} = \frac{\sigma_1^2\sigma_2^2}{\sigma_1^2 + \sigma_2^2}}$
权重方式下最优 $\alpha$下的方差一定优于简单的算术平均下的方差(方差反映偏离程度,也就是说前者的偏离程度一定更小)。
$\frac{\sigma_1^2\sigma_2^2}{\sigma_1^2+\sigma_2^2} \le \frac{\sigma_1^{2}+\sigma_2^{2}}{4}$
说明:
➡ 最优加权融合一定比简单平均更准
➡ 即使两传感器噪声很大,融合仍能降低不确定性。
这就是卡尔曼滤波存在的根本理由。
卡尔曼滤波
预测(Prediction)阶段
① 状态预测
$\hat{x}_k^- = A_k \hat{x}_{k-1} + B_k u_k$
② 协方差预测
$P_k^- = A_k P_{k-1} A_k^T + Q_k$
更新(Update / Correction)阶段
③ 卡尔曼增益
$K_k = P_k^- C_k^T \left(C_k P_k^- C_k^T + R_k \right)^{-1}$
④ 状态更新(融合预测和观测)
$\hat{x}_k = \hat{x}_k^- + K_k \left(z_k - C_k \hat{x}_k^- \right)$
⑤ 协方差更新(更新后的最优不确定度)
$P_k = (I - K_k C_k) P_k^-$
① 状态预测
根据上一时刻的最佳估计 + 控制输入,预测当前位置的状态,纯预测(没有用到观测值)。
$\boxed{\hat{x}_k^- = A_k \hat{x}_{k-1} + B_k u_k}$
$A_k$:系统如何从上一时刻演变到下一时刻(状态转移矩阵),转移矩阵实际上就是模型
若状态为: $x = \begin{bmatrix} \text{位置} \\ \text{速度} \end{bmatrix}$
那么状态转移矩阵: $A = \begin{bmatrix} 1 & \Delta t\\ 0 & 1 \end{bmatrix}$
含义:
$\text{位置} = \text{旧位置} + \text{速度}\cdot \Delta t$
$\text{速度} = \text{旧速度}$急症室
$u_k$:控制输入(输入量)
$B_k$:控制矩阵(告诉你:输入如何影响状态)
例子:
若: $u_k = \text{加速度}$
那控制矩阵可能为: $B_k = \begin{bmatrix} 0.5 \Delta t^2 \\ \Delta t \end{bmatrix}$
含义:
- 加速度让位置变成:$0.5at^2$
- 加速度让速度变成:$at$
举例汽车定位: $x = \begin{bmatrix} \text{位置} \\ \text{速度} \end{bmatrix}$
上一帧估计: $x_{k-1} = \begin{bmatrix} 10m \\ 2m/s \end{bmatrix}$
加速度输入:$u_k = 1m/s^2$,时间间隔 1 秒
那么: $A = \begin{bmatrix} 1 & 1\\ 0 & 1 \end{bmatrix} ,\quad B = \begin{bmatrix} 0.5 \\ 1 \end{bmatrix}$
预测: $x_k^- = A x_{k-1} + B u_k = \begin{bmatrix} 1 & 1\\ 0 & 1 \end{bmatrix} \begin{bmatrix} 10 \\ 2 \end{bmatrix} + \begin{bmatrix} 0.5 \\ 1 \end{bmatrix}(1)$
计算: $x_k^- = \begin{bmatrix} 12.5 \\ 3 \end{bmatrix}$
解释:
- 位置从 $10 → 12.5$
- 速度从 $2 → 3$
② 协方差预测
$P_k^- = A_k P_{k-1} A_k^T + Q_k$
误差会随着系统模型被传递、放大、旋转等,而同时真实世界还会加入额外噪声 Q,因此预测的不确定性会增加。
A 左乘 → 对误差进行变换
Aᵀ 右乘 → 对误差区域进行“逆变换”的配套操作,使得协方差保持对称、正定 A 与 Aᵀ 必须成对出现,才能保证协方差保持对称矩阵。
$Q_k$ 表示真实世界中模型没有描述的误差。
一维的推算:
误差的方差 $P = E[e^2] = D(e)$
根据一维误差传播: $e_k^- = a e_{k-1}$
方差: $P_k^- = E[(e_k^-)^2] = E[(a e_{k-1})^2]$ $= a^2 E[e_{k-1}^2]$ $= a^2 P_{k-1}$
⭐ 一维误差传播: $P_k^- = a^2 P_{k-1}$ 这就是 $A P Aᵀ$ 的一维形式。
假设状态是二维:
$x = \begin{bmatrix} x_1 \\ x_2 \end{bmatrix}$
误差: $e = x - \hat{x}$
误差的协方差: $P = E[ee^T]$
状态转移为: $x_k = A x_{k-1}$
预测: $\hat{x}_k^- = A\hat{x}_{k-1}$
误差传播: $e_k^- = x_k - \hat{x}_k^- = A(x_{k-1} - \hat{x}_{k-1}) = A e_{k-1}$
然后计算方差(注意现在是矩阵): $P_k^- = E[e_k^- (e_k^-)^T]$
代入 $e_k^- = A e_{k-1}$: $P_k^- = E[(A e_{k-1})(A e_{k-1})^T]$ $= E[A e_{k-1} e_{k-1}^T A^T]$
由于 A 是常数矩阵: $= A E[e_{k-1} e_{k-1}^T] A^T$
而: $E[e_{k-1} e_{k-1}^T] = P_{k-1}$
因此:⭐ 误差传播公式(二维) $P_k^- = A P_{k-1} A^T$
③ 卡尔曼增益
$K_k = P_k^- C_k^T \left(C_k P_k^- C_k^T + R_k \right)^{-1}$
Kₖ = 最优权重(Optimal Weight)含义是:该相信预测(模型)多少? 该相信观测(测量)多少?
- 如果预测不确定性大 $P^- \uparrow,Kₖ ↑$ → 更相信观测
- 如果观测噪声大 $R \uparrow,Kₖ ↓$ → 更相信模型
一维情况,前面已经写过:$K = \frac{P^-}{P^- + R}$,
其中: $P^-$:预测误差(模型不确定性);$R$:观测误差(传感器不确定性)
$K$ 是一个 权重:
- 如果预测很不准(P⁻ 大) → K 大 → 多信观测;如果观测噪声大(R 大) → K 小 → 多信预测
这是 最优加权融合。
多维下公式变复杂了,但含义是一样的。
多维情况,
因为状态通常是多维的,例如: $x = \begin{bmatrix} p_x \\ p_y \\ v_x \\ v_y \end{bmatrix}$
观测也是多维的: $z = \begin{bmatrix} x \\ y \end{bmatrix}$
而且观测并不一定是“直接等于状态”,而是: $z_k = C_k x_k + v_k$
$P_k^- C_k^T$: 把状态预测的不确定性(P⁻)投影到观测空间。表示:“预测的不确定性,会影响你对观测方向上误差的判断。”也就是:预测有多不确定,会反映到观测中来。
$C_k P_k^- C_k^T + R_k$:$C P⁻ Cᵀ$ :表示如果按当前预测状态去计算,会得到怎样的观测?其不确定性是多少?即:“预测观测值的不确定性(在传感器空间中)”**。R 表示观测噪声
$\underbrace{C P^- C^T}_{\text{预测误差变成观测误差}} + \underbrace{R}_{\text{传感器噪声}}$
④ 状态更新(融合预测和观测)
$\hat{x}_k = \hat{x}_k^- + K_k \left(z_k - C_k \hat{x}_k^- \right)$
- Cₖ 是观测模型
- $Cₖ\hat{x}_k^-$ 是预测出的“应该看到的观测”
- zₖ 是实际“看到的观测”
前述:
- 模型的预测 $\hat{x}_k^- = A_k \hat{x}_{k-1} + B_k u_k$
- 最优权重$K_k = P_k^- C_k^T (C_kP_k^-C_k^T + R_k )^{-1}$ -- > 预测值和观测值谁更可信?
- 如果预测不确定性大 $P^- \uparrow,Kₖ ↑$ → 更相信观测
- 如果观测噪声大 $R \uparrow,Kₖ ↓$ → 更相信模型
创新(innovation)或**残差(residual)**部分:$z_k - C_k \hat{x}_k^-$,实际观测 - 预测得到的“观测”,传感器给我们的数据,到底与我们预测的差了多少?
公式逻辑如下:
1️⃣ 先用模型预测状态 $\hat{x}^-_k$
2️⃣ 再看看传感器实际看到的$zₖ$
3️⃣ 对比得到预测误差(创新)
4️⃣ $Kₖ$ 决定误差要吸收多少
5️⃣ 加到预测值中,得到最终最优估计 $\hat{x}_k$
⑤ 协方差更新(更新后的最优不确定度)
$P_k = (I - K_k C_k) P_k^-$
$I = \begin{bmatrix} 1 & 0 & 0 & \cdots & 0 \\ 0 & 1 & 0 & \cdots & 0 \\ 0 & 0 & 1 & \cdots & 0 \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & 0 & \cdots & 1 \end{bmatrix}$
所以 (I - K C) 表示:从“保持原样”开始(I),再减去 “被修正的部分” (K C),预测误差 = 原预测误差 – 被观测修正掉的误差。
理解:I 是“100%”;K C 是“纠正比例”; (I − K C) 是“剩下的误差比例”。
. 问题
Q1:既然转移矩阵 $A_k$实际上就是模型,那么能不能把$B_k u_k$ 部分也纳入到转移矩阵中,作为模型的一部分?这样不就简化成:$\hat x_k^- = A\hat x_{k-1}$?
A: 数学上确实可以合并 $x'_k = \begin{bmatrix} x_k \\ u_k \end{bmatrix}$ ==> $x'_k = A'_k \, x'_{k-1}$
但工程应用中通常不这么干,原因是 uₖ(控制量)不仅仅是状态,下一帧可能变化,合并意味着下一帧完全由上一帧的状态决定。
控制输入$B_k u_k$ 与状态具有不同含义和不同物理来源,需要分开表示。
但在一些完全不能控制、估算的的因素,有时反而必须纳入到状态转移矩阵中,作为模型的一部分。构建扩展状态如:
$x = \begin{bmatrix}位置 \\ 速度 \\ 姿态 \\ 振动偏置 b_g \\ 加速度偏置 b_a \end{bmatrix}$
| 场景 | 为什么必须加入? |
|---|---|
| ① 控制量有噪声且不可直接测量 | KF 需要估计它 |
| ② 控制量存在 scale、offset、系统误差 | 否则模型长期偏掉 |
| ③ 控制量具有动态性质,不是即时输入 | 动力学决定成为状态 |
| ④ 控制量未知且需估计真实值 | 外部输入不可靠 |
| ⑤ 外力、风扰等未知输入 | 必须纳入扩展状态 |
| ⑥ 做系统辨识(估计模型参数) | 参数本身就是状态 |
| 在机器学习中,把一些不可测的因子纳入到模型中,通过机器学习算法来评估。 |
Q: $A_k$ ,$C_k$的区别是什么?
✔ Aₖ 是动力学模型(系统怎么动),系统通上一帧到当前帧状态怎么转换的。回答“系统自身在物理规律下,会如何运动?”
✔ Cₖ 是观测模型(传感器怎么看),Cₖ 描述了传感器观测值 zₖ 与状态 xₖ 之间的线性关系,即:状态在传感器中的呈现方式(观测模型)。 回答“传感器看到状态的哪一部分?以什么关系看到?”。“预测值在传感器眼中应该长什么样””
Cₖ 提供观测,使得卡尔曼滤波可以用 zₖ 来修正由 Aₖ 预测产生的误差。
真实系统: x ----(A)---➡️ x预测
传感器: x ----(C)---➡️ z观测 Aₖ 负责预测。
Cₖ 负责描述传感器看到什么。
用 zₖ 与 $Cₖ\hat{x}^-$ 的差距来修正 Aₖ 的误差。
修正的核心由 $K_k$(最优权重(Optimal Weight)) 完成。
预测(靠 Aₖ) + 修正(靠 Cₖ)。